
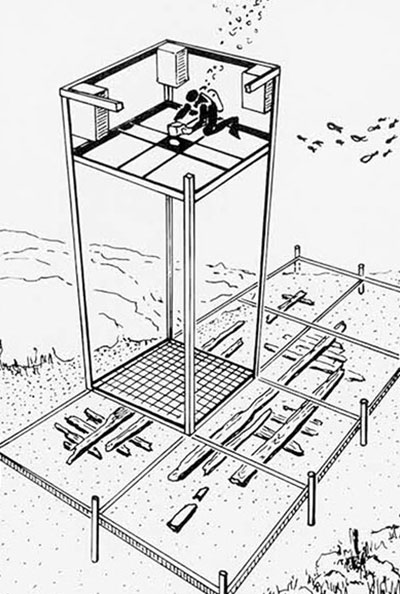
Step frame grid aids in accurate mapping of site.
In the spring of 1960, seven men and women arrived in Turkey to excavate a Bronze Age shipwreck ninety-five feet deep. Only four had ever dived before.
Our only excavating tools were pencils and plastic paper, meter tapes and surveyors’ poles, three underwater cameras, two lifting balloons, a crowbar, and an airlift or suction hose. Local blacksmiths added hammers, picks, chisels, a smaller air lift, and a wire lifting basket to the list.
This was the University Museum’s first step into underwater archaeology.
We soon realized that we needed new and better tools for our work. During the excavation of a deeper Byzantine ship, between 1961 and 1964, we developed faster and more accurate methods of mapping under water, we improved our diving equipment, and we experimented with diver communications systems.
Still, our methods were crude. Analyses of our diving logs showed that it took ten to fifteen divers seven months to accomplish what five men could have done on land in one month. If we wished to dive and work longer each day, however, we would have to decompress longer to avoid the bends; and we had already reached the limits at which we wanted to hang on a rope beneath the surface, breathing off the compressed air in our bodies, at the end of each dive.
And we still did not know how to find wrecks. All of the istes we had studied so far were found by Turkish sponge divers and shown to Peter Throckmorton in the late 1950’s. In 1964, we knew of potentially important wrecks, from bronze statues netted by sponge draggers, but we had no means of locating them in 300 feet of water.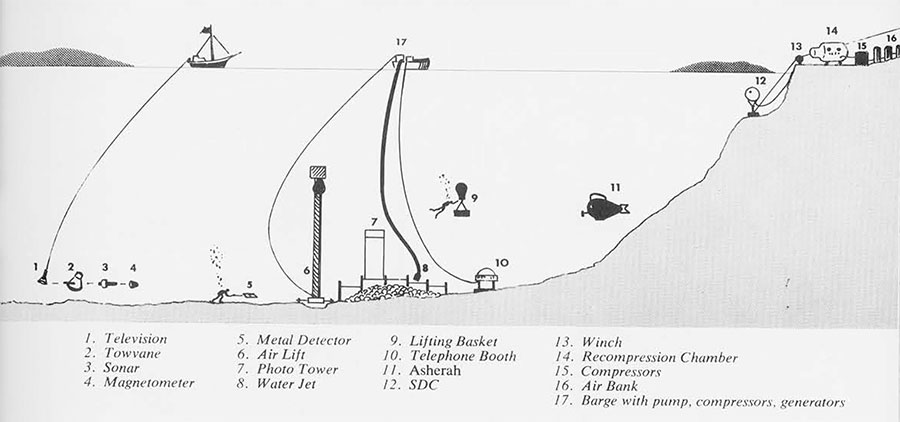
The diagram above shows some of the equipment we used in 1965, when we began a search for these deep wrecks, and in 1967, when we continued the search and began the excavation of a Roman ship, 120 to 140 feet deep, just off Yassi Ada. Most of these devices are described separately on the following pages.
Telephone Booth
 The Museum’s underwater telephone booth is a plexiglass hemisphere, four feet in diameter, with a steel collar around its lower edge to increase volume. Fresh air flows into it from a compressor on the barge anchored above; angle-iron legs, bolted to 1,500 pounds of ballast, keep the air-filled dome from rising off the sea bed.
The Museum’s underwater telephone booth is a plexiglass hemisphere, four feet in diameter, with a steel collar around its lower edge to increase volume. Fresh air flows into it from a compressor on the barge anchored above; angle-iron legs, bolted to 1,500 pounds of ballast, keep the air-filled dome from rising off the sea bed.
The booth was placed less than five feet from the Roman wreck in 1967. Up to four divers could stand inside, dry from their chests up, and discuss excavation problems while looking out over the site. They could also telephone the barge, or talk to colleagues on Yassi Ada, working on plans of the wreck, with a radio-telephone combination.Safety was increased greatly by the phone booth. Every diver knew that if he ran our of air, or became sick or exhausted, he did not have to make it to the surface, 140 feet above, but could swim a few feet to the booth for fresh air or an emergency set of equipment kept there.The telephone booth was conceived by Michael and Susan Katzev of the Museum’s underwater section, and was built by Farquhar Transparent Globes of Philadelphia. It has proved cheaper and more reliable than most diver-to-diver electrical communications systems we have teste.
SDC
 In order to increase diving times on the 140-foot-deep Roman wreck, it was necessary to increase decompression times to an hour or more. For such lengthy decompressions, I designed a submersible decompression chamber (SDC) which was built by Roberto Galeazzi of La Spezia, Italy.
In order to increase diving times on the 140-foot-deep Roman wreck, it was necessary to increase decompression times to an hour or more. For such lengthy decompressions, I designed a submersible decompression chamber (SDC) which was built by Roberto Galeazzi of La Spezia, Italy.
The SDC is a steel sphere, more then six feet in diameter, fed with air through a hose. Up to four divers can enter through a bottom hatch. Once inside they can talk, read, take notes, or converse with colleagues on Yassi Ada by means of a telephone. Light enters through glass ports.The air-filled sphere is held under water by a cable which runs to five tons of ballast on the sea bed. The cable passes through a pulley attached to the ballast and continues on to a chain hoist on the island. One man can control the depth of the buoyant SDC, allowing it to rise up through the various stages of decompression ten feet at a time.Should a diver be stricken by the “bends” during decompression, he could be placed in a one-man cylindrical chamber through a side hatch on the SDC. This smaller chamber could be raised to the surface, with the diver inside, and locked into our large, four-man double-lock recompression chamber on Yassi Ada.
The Asherah
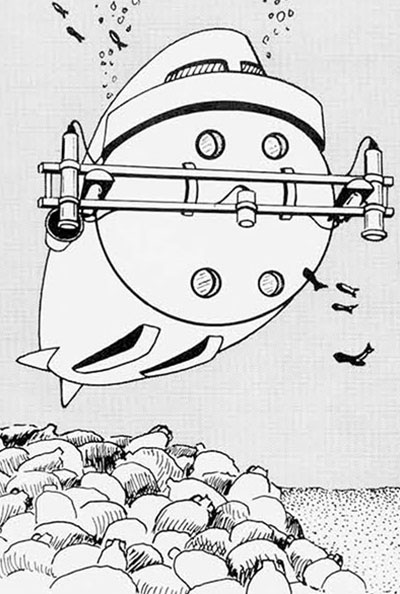 The University Museum’s two-man submarine Asherah in 1967. A closed-circuit television camera, mounted between these cameras, gave the occupants of the submarine a view of what was passing below.
The University Museum’s two-man submarine Asherah in 1967. A closed-circuit television camera, mounted between these cameras, gave the occupants of the submarine a view of what was passing below.
When desired, the cameras and their stroboscopic lights could be triggered electronically, resulting in stereophotographs. A third camera, inside the Asherah, photographed a panel which held tilt indicators, a variable depth gauge, and a counter, all of which aid the photo-interpreter in making three-dimensional plans from the stereo pairs.
The Asherah was also used for searching in 1967. When a sonar contact was made in the area of a suspected shipwreck nearly 300 feet deep, the Asherah was sent down to investigate. At a depth of 285 feet, less than half its capability but too deep for search by aqualung divers, the submarine sighted and photographed the cargo of an ancient ship.
Our improved stereophotographic system was designed by Donald Rosencrantz; the cameras and television for it were built by the Oceanographic Engineering Corporation of San Diego, California.
Photo Tower
 Photography from the Asherah requires charging the submarine’s batteries, mounting and dismounting the cameras, and using a sizable surface crew for communications and other support. Strong currents can prevent photographic dives with the submarine.
Photography from the Asherah requires charging the submarine’s batteries, mounting and dismounting the cameras, and using a sizable surface crew for communications and other support. Strong currents can prevent photographic dives with the submarine.
Daily photographs of various areas of a site during excavation are taken simply from the top of a 15-foot-high photographic tower. The angle-iron tower is held upright by four air-filled containers in its top corners. The camera is placed in the center of a cross frame which may be moved up and down for photographs from various distances.
The tower rests on and moves across a scaffolding of horizontal frames on pipe legs. Stereophotographs can be taken either by moving the camera between fixed positions on its cross bar, or by moving the entire tower a fixed distance between photographs.
Robert Hodgson, a physicist from the Naval Ordnance Test Station in Pasadena, California, made a series of detailed tests at Yassi Ada in 1967, and prepared a report recommending the films, developers, and paper for optimum results. This has allowed us to take photographs from greater heights, thus covering larger areas, than before.
Metal Detector
 A modified mine detector, brought to Cape Gelidonya in 1960 by Luis Marden of the National Geographic Society, successfully located deposits of copper and bronze beneath sand and sea concretions.
A modified mine detector, brought to Cape Gelidonya in 1960 by Luis Marden of the National Geographic Society, successfully located deposits of copper and bronze beneath sand and sea concretions.
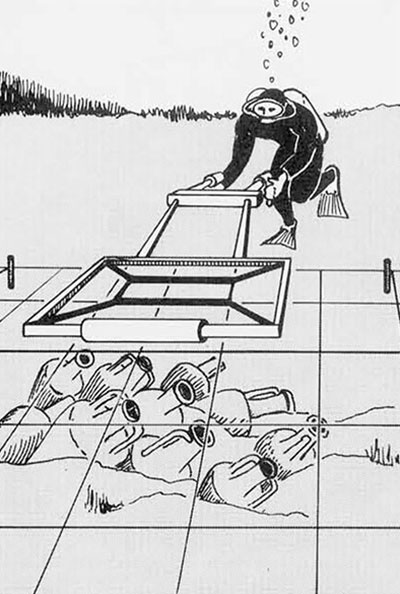
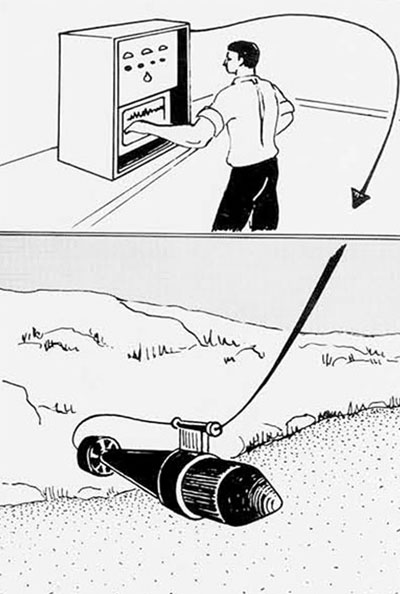
In 1967, on the Roman wreck at Yassi Ada, we used a new metal detector, designed and built by Jeremy Green of the Research Laboratory for Archaeology and the History of Art, Oxford. A diver, moving the detector before him with two handles, was notified of the presence of metal, including iron and lead at Yassi Ada, by the intensity of sound coming over a head phone. The detector could be made neutrally buoyant, for ease of handling, by adding air or water to a canister on its front.
The same metal detector was used more extensively by Michael Katzev during his underwater survey off Cyprus for the University Museum. Mr. Green had replaced the headphone by a dial between the handles, so that the diver was notified of a find visually rather than by sound. For added sensitivity this dial can be adjusted to various water conditions, taking into account the residual metallic content of the water. The importance of the metal detector in making the pre-excavation survey of a shipwreck site has been well shown by Katzev and others.
Air Lift
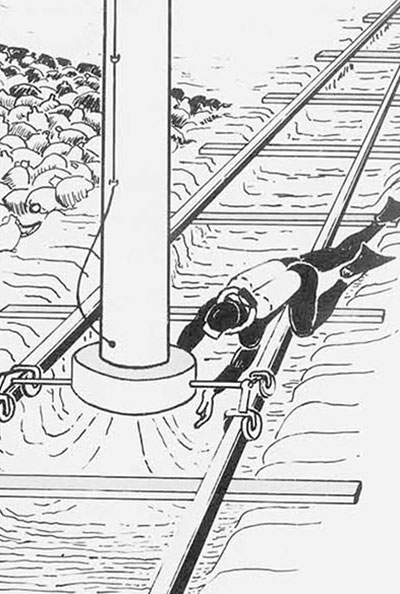 As excavators dig deeper into a site, carefully picking out artifacts and cleaning wood remains, they sweep the sand aside. The ultimate removal of great mounds of barren sand usually requires an air lift.The air lift is a vertical pipe to whose lower end air is pumped from the surface; the air, in the form of expanding bubbles, rises through the pipe, sucking water and sand with it. Hand-held air lifts, from three to six inches in diameter, were used on the Bronze Age and Byzantine wrecks.Because air lifting is a time-consuming process, requiring little archaeological skill, we believed that it should be speeded and automated. Seventy feet of double track was constructed beside the Roman wreck in 1967, and an aluminum pipe, ten inches in diameter and seventy feet tall, was attached to wheeled trolleys on each rail; an air-filled oil drum buoyed the upper end of the pipe. A diver could easily move this large air lift anywhere along the side of the wreck to remove sand piles. In the future we hope to save diving time by moving an air-lift and water-jet combination back and forth along the tracks, by means of ropes leading to the surface, thus keeping an open trench for the reception of sand.The track was from the American Monorail Co., the pipe from the Penn Metal Corp.
As excavators dig deeper into a site, carefully picking out artifacts and cleaning wood remains, they sweep the sand aside. The ultimate removal of great mounds of barren sand usually requires an air lift.The air lift is a vertical pipe to whose lower end air is pumped from the surface; the air, in the form of expanding bubbles, rises through the pipe, sucking water and sand with it. Hand-held air lifts, from three to six inches in diameter, were used on the Bronze Age and Byzantine wrecks.Because air lifting is a time-consuming process, requiring little archaeological skill, we believed that it should be speeded and automated. Seventy feet of double track was constructed beside the Roman wreck in 1967, and an aluminum pipe, ten inches in diameter and seventy feet tall, was attached to wheeled trolleys on each rail; an air-filled oil drum buoyed the upper end of the pipe. A diver could easily move this large air lift anywhere along the side of the wreck to remove sand piles. In the future we hope to save diving time by moving an air-lift and water-jet combination back and forth along the tracks, by means of ropes leading to the surface, thus keeping an open trench for the reception of sand.The track was from the American Monorail Co., the pipe from the Penn Metal Corp.
Water Jet
 An ancient wreck may be covered partially or completely with several feet of sand. The removal of tons of this overburden with a small air lift is a most time-consuming task, and a large air lift often proves too cumbersome to be moved easily over a site. A high-pressure water jet can be used to cut through the thickest layers of the sand cover and force them away from the wreck site.
An ancient wreck may be covered partially or completely with several feet of sand. The removal of tons of this overburden with a small air lift is a most time-consuming task, and a large air lift often proves too cumbersome to be moved easily over a site. A high-pressure water jet can be used to cut through the thickest layers of the sand cover and force them away from the wreck site.
The water jet is no more than a fire hose running from a pump on the barge above. It can be moved to any point in a wreck. Special recoilless nozzles, which send water backward as well as forward to prevent “kick,” are available, but we did not use ours in 1967; to prevent being forced away, divers simply braced themselves against the mapping frames on the site.
The water jet is effective only if there is a current to carry away immediately the thick clouds of mud stirred up. It can easily destroy artifacts if used carelessly, but a careful excavator, by adjusting the nozzle to form a fine spray, can even use it on the more solid wood remains without damaging them. A hand-held device, combining a small water jet and medium-sized suction hose, might prove to be the ideal excavating tool.
Amphora Carrier
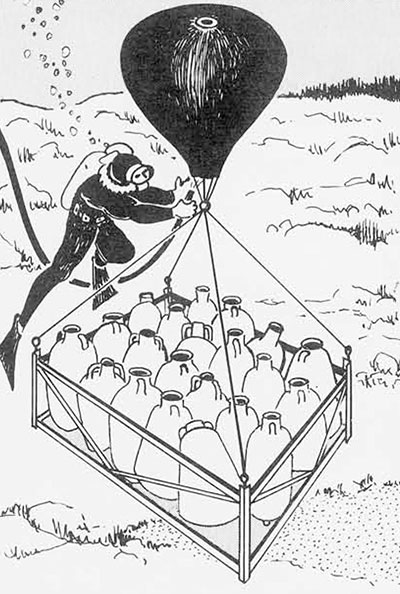 Most ancient ships found in the Mediterranean carried cargoes of wine, oil, and other commodities in two-handled storage jars known as amphoras. In almost all cases, the original contents disappeared centuries ago, but hundreds of heavy amphoras, now filled with mud and sand, must be removed from each wreck during excavation. Efforts to raise them individually, by filling them with air so that they float upward, or by hauling them up with ropes, have proved tedious and time-consuming.
Most ancient ships found in the Mediterranean carried cargoes of wine, oil, and other commodities in two-handled storage jars known as amphoras. In almost all cases, the original contents disappeared centuries ago, but hundreds of heavy amphoras, now filled with mud and sand, must be removed from each wreck during excavation. Efforts to raise them individually, by filling them with air so that they float upward, or by hauling them up with ropes, have proved tedious and time-consuming.
We have considered using a portable conveyor belt, run by compressed air, or a wheeled flatbed capable of moving a hundred amphoras at a time when winched from land with a cable. The simplest solution to this seemingly simple problem of amphora removal still seems to be a large lifting basket and balloon.
In 1967 we constructed a wooden basket large enough to hold over twenty amphoras at a time. Whenever it was full, we used an air hose to fill a balloon attached to its top. The balloon could lift half a ton of cargo to the surface at once, where a dinghy towed it into shallow water for the leisurely removal of the basket’s contents by snorkelers. This has probed to be a simpler and cheaper method of raising cargo than by winch.
Towvane
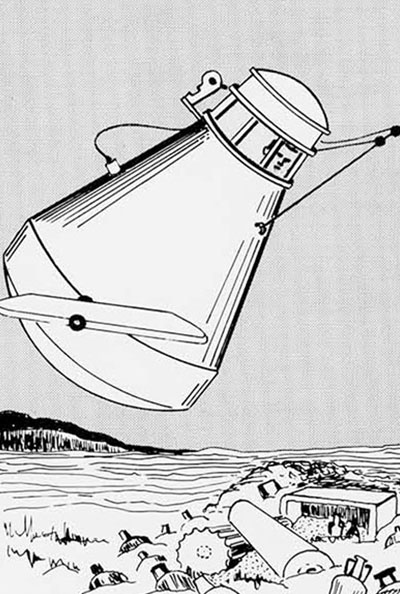 The Towvane is a steel observation capsule used by the Museum during search operations in 1965. It holds one man along with an air-purifying system and additional oxygen. A plexiglass window provides the pilot with a 360-degree view around him.
The Towvane is a steel observation capsule used by the Museum during search operations in 1965. It holds one man along with an air-purifying system and additional oxygen. A plexiglass window provides the pilot with a 360-degree view around him.
The Towvane is pulled behind a trawler on a thousand feet of nylon line. The pilot, by turning wheels inside, tilts wing-like vanes on either side of the capsule, causing it to plane downward or upward through the water.
Should he, by any mishap, lose consciousness and release the controls, the buoyant Towvane would float to the surface. The trawler crew on the surface uses a fathometer in order to warn the Towvane pilot, by telephone, of any obstacles in his path.
The Towvane was used in depths down to 300 feet off the Turkish coast, but limited visibility in the search area prevented successful results. We consider it a useful, relatively simple vehicle, however, for searching in clear water over a flat sea bed; addition of miniaturized sonar might make it even more effective.
The Towvane, an invention of Australian salvage diver Macleay Lawrie, was provided by Nixon Griffis, president of the Towvane Co. in New York.
Magnetometer
 A proton magnetometer detects disturbances in the earth’s magnetic field caused by the presence of material more or less magnetic than the earth. It is especially effective in detecting iron, and has been used with great success in locating the metal hulls and fittings of lost ships.
A proton magnetometer detects disturbances in the earth’s magnetic field caused by the presence of material more or less magnetic than the earth. It is especially effective in detecting iron, and has been used with great success in locating the metal hulls and fittings of lost ships.
Dr. E. T. Hall, Director of the Research Laboratory for Archaeology and the History of Art, Oxford, noted that a proton magnetometer will detect the presence of pottery at close range, because of the small amounts of iron in the clay. He wondered if a towed magnetometer could detect a large mound of pottery such as the cargo of an ancient ship, at a much greater range.Anomalies would be shown on a meter kept on board the towing vessel. An underwater proton magnetometer, designed by Dr. Hall, was tested briefly in our unsuccessful search in 1965, but without conclusive results.Dr. Hall has since located a wreck in Israel with his magnetometer, and later used it successfully during the University Museum’s search operations in Cyprus, described by search director Michael Katzev elsewhere in this number of Expedition. There, after finding a shallow wreck at Cape Andreas, the magnetometer was used to identify buried metal on the “Kyrenia” wreck.
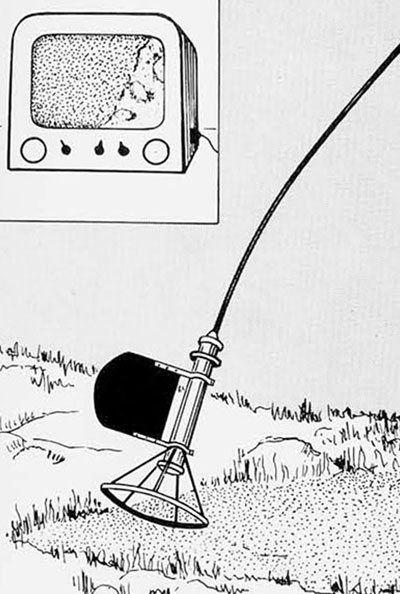
Television
 Closed-circuit television has proved useful to others in the excavations of a Roman ship off France, colonial bateaux in Lake George, N.Y., and fur traders’ canoes in northern rivers. In each case it allowed archaeologists on the surface to follow the work taking place under water. Television, usually in conjunction with sonar, has also been successful during search operations for lost submarines and airplanes.
Closed-circuit television has proved useful to others in the excavations of a Roman ship off France, colonial bateaux in Lake George, N.Y., and fur traders’ canoes in northern rivers. In each case it allowed archaeologists on the surface to follow the work taking place under water. Television, usually in conjunction with sonar, has also been successful during search operations for lost submarines and airplanes.
The University Museum’s first use of television during its search, in 1965, for wrecks which had yielded bronze statues to sponge nets. Sometimes the camera was simply towed above the bottom on its own cable, and at other times it was towed on a heavy wheeled axle. Three hundred feet above, observers in the trawler cabin watched a clear path of sea bed, up to fifteen feet wide, pass by a monitor screen. The television, built by General Precision, Inc., of Pleasantville, N.Y., provided a clearer view of the sea bed than could the human eye.
The search areas were larger than had been anticipated, however, and the narrow range was not sufficient for successful coverage of the entire bottom in the areas. We believe, however, that television will be perfect for the future inspection of sonar targets.
Sonar
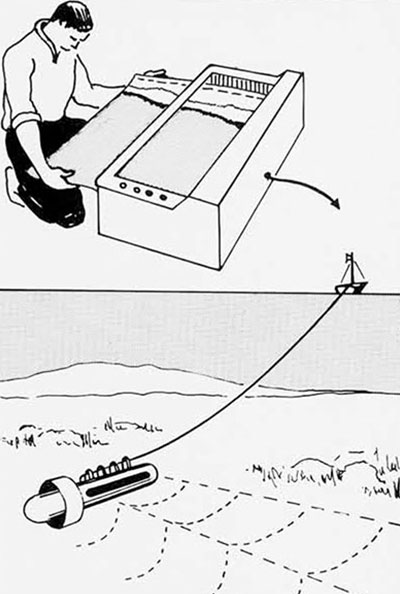 Side-scanning sonar transmits high-frequency sound waves out to each side as it is towed through the water. Reflections are timed as they return to it, and any object on a flat sea bottom presents an anomaly on the recorded in the ship above.
Side-scanning sonar transmits high-frequency sound waves out to each side as it is towed through the water. Reflections are timed as they return to it, and any object on a flat sea bottom presents an anomaly on the recorded in the ship above.
The great range of sonar makes it ideal for searching large, deep areas, but visual inspection must follow to determine what any target is. In 1967 we searched two areas, each about four square miles in size, for wrecks 300 feet deep. Navigation was effected by three land-based transit operators about a mile apart, who radioed bearings to the ship every two and a half minutes.
We used two side scanners. The first, brought and operated by the Scripps Institution of Oceanography of the University of California, had a search range of 600 feet on either side. It spotted fifteen possible targets in the first area, and one major target in the second. The second sonar, brought and operated by Martin Klein of EG&G, International, of Boston, was later used to return to this last site and further pinpoint its location for dropping a buoy. The Asherah descended and landed on a cargo 285 feet deep. The other fifteen targets will be inspected in 1968 by closed-circuit television.
Not all of the devices were new, of course. Some had been used in other branches of underwater research, and some had been used on previous archaeological expeditions. It was our aim to combine new, old, and modified techniques in a single program lending toward more efficient underwater archaeology.
Some of the problems confronting us had been solved for other fields, but we had to solve them within the more limited budgets available for archaeology. An oceanographic research vessel, for example, costs more each day than our expedition trawler costs in a month. Submersible decompression chambers are used by a number of commercial and naval projects, but ours was designed strictly for its economy and simple logistical support.

The summers of 1965 and 1967 were largely experimental. We feel, however, that we have solved some of our more pressing problems. We were able to locate a wreck 300 feet deep. We were able to accomplish, on a wreck 140 feet deep, more than we had ever done before in one summer on less deep wrecks. And we had trained more than a dozen graduate students of archaeology to dive and use our new techniques. Now that we are familiar with these techniques, we can devote still more of our time to the purpose of this experimentation—the uncovering of history beneath the floor of the sea.